The Mobile Robotics Group



About us
The Mobile Robotics Group (MRG) is the original group that grew into today’s Oxford Robotics Institute (ORI). Since 2005, our mission has been to tackle the hardest problems in mobile autonomy: answering the fundamental questions of “Where am I?” and “What surrounds me?” on real robots operating in complex, real-world environments. We have a proud systems heritage, taking on ambitious field deployments that stress-test technology and expose what needs to be solved next. Over the years, our work has led the way in large-scale SLAM, localisation from vision and lidar, and the practical engineering of autonomous systems. In 2014, MRG operated the first autonomous vehicle on UK public roads — a landmark now celebrated at the National Science Museum. Today, our focus is on the next generation of autonomy: scalable systems that fuse novel sensing, machine learning, and robotics insights to make autonomy robust, reliable, and useful in the wild.

Autonomous vehicles
From our earliest days, vehicles have been central to MRG’s research. In 2014, we achieved a UK first: operating a self-driving car on public roads. Since then, our work has advanced all aspects of autonomous driving — perception, localisation, planning, and safety. Our research has seeded prestigious datasets, influential publications, and the spin-out company OXA, bringing Oxford autonomy to the world.
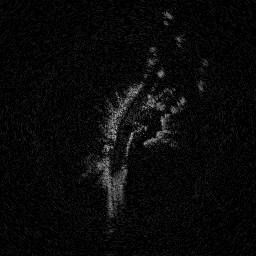
Uncommon sensing modalities
We pioneered the use of radar for autonomy, demonstrating how robust long‑range sensing complements vision and lidar in challenging conditions such as fog, rain, and night-time driving. Today, MRG continues to explore unconventional and underused sensing technologies — from ground-based radar to satellite signals and CCTV networks — to deliver reliable autonomy in environments where conventional sensors alone are not enough.
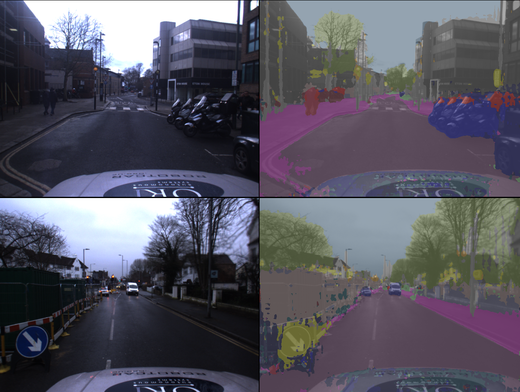
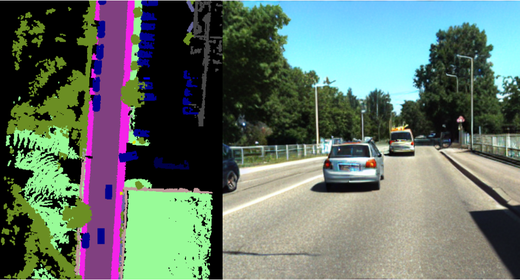
Scene understanding
Beyond knowing ‘where we are,’ robots must understand complex, dynamic scenes. Our research develops methods for semantic mapping, object recognition, and long-term scene interpretation. We combine classical robotics with deep learning to make environments legible and predictable for autonomous systems.
Data synthesis
Real-world data is costly and imperfect. We investigate approaches for generating high-quality synthetic data — from simulated environments to neural rendering — to augment training, accelerate development, and improve robustness of autonomous systems in the field.

Dataset recording and sharing
Field robotics is about going out into the world. MRG builds and deploys bespoke platforms — from cars to space robots to bicycles — equipped with cutting-edge sensors. These systems let us gather unique datasets in real environments, which we then make available to the wider community through careful curation and open science initiatives.