Deployment
Scaling Robotic Infrastructure: A Case Study in Orchestration
This research project, conducted in collaboration with Omniscient Innovations Ltd, Gompels Healthcare Ltd, and the Mobile Robotics Group (MRG), explored the transition from manual container orchestration to a configuration-driven deployment model for infrastructure-led robotics.
Read More
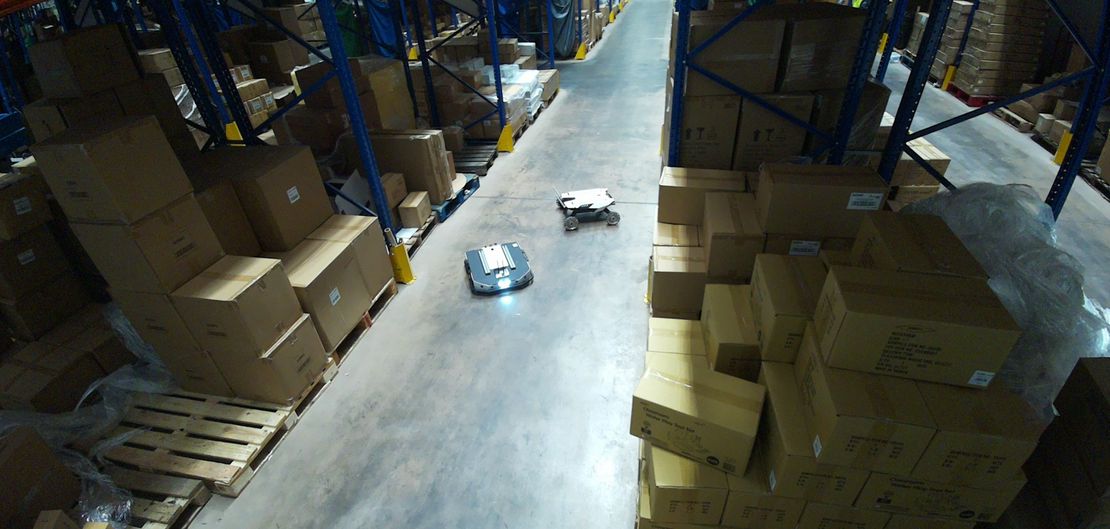
Building-Scale Robot Navigation via a Relay of External Cameras
Most robotic navigation systems rely on a familiar stack: onboard sensors, carefully calibrated cameras, detailed maps, and expensive localisation pipelines. We wanted to explore the opposite direction: what happens if the robot itself becomes extremely simple, and the intelligence moves into the environment instead?
Read More