Usage
The RobotCycle dataset supports research in autonomous mobility, safety analysis, multimodal perception, and urban planning.
Initial Analysis
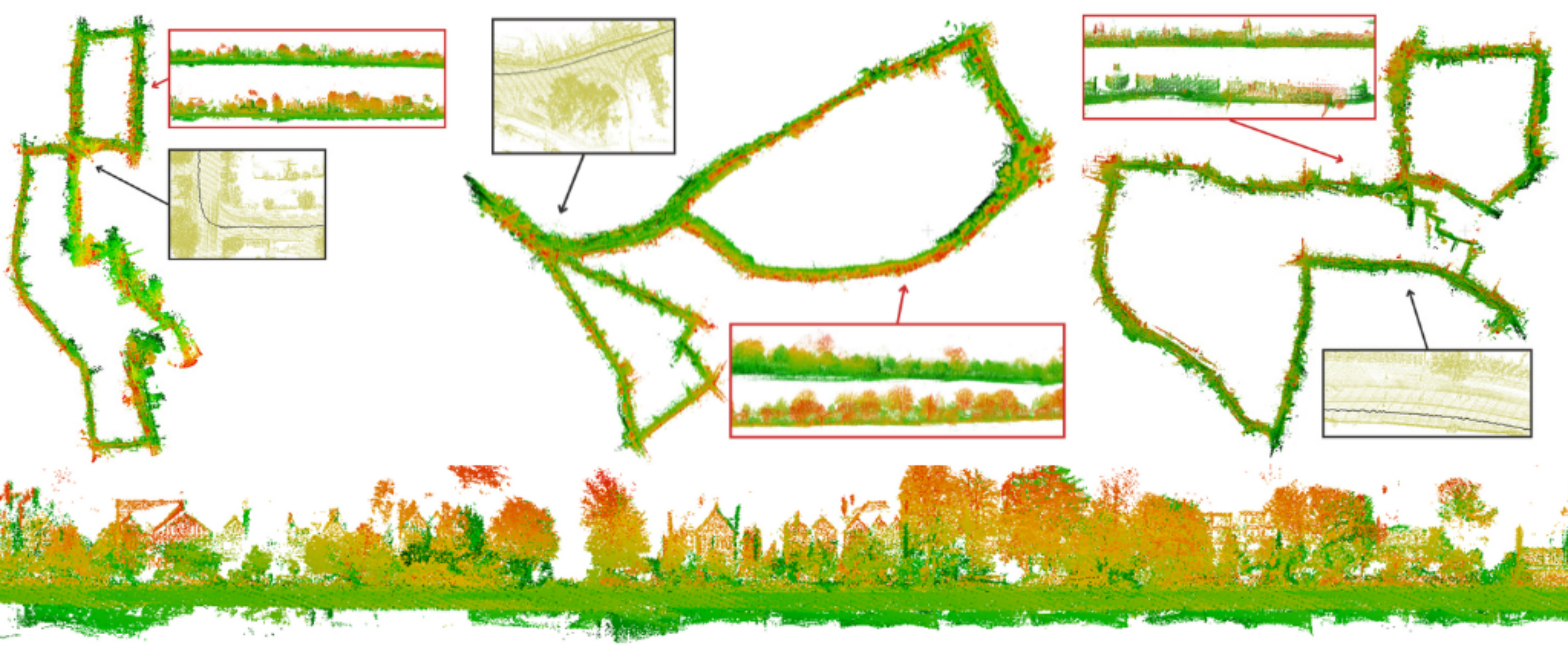
1. 3D Reconstruction and Odometry
- Challenging dataset due to sharp maneuvers and non-rigid motion.
- Serves as a benchmark for dynamic and real-world odometry estimation.
- Evaluated the robustness of KISS-ICP for LiDAR odometry on dynamic cycling data.
2. Risk and Interactions Analysis
- Classified segments into four infrastructure categories (Types A–D): no cycle lane, on-road lane, segregated track, and shared-use path.
- Correlated traffic intensity and lane geometry with vehicle proximity, TTC, and lane infingements.
- Identified high-risk areas such as The Plain Roundabout and the road works in Woodstock Road.

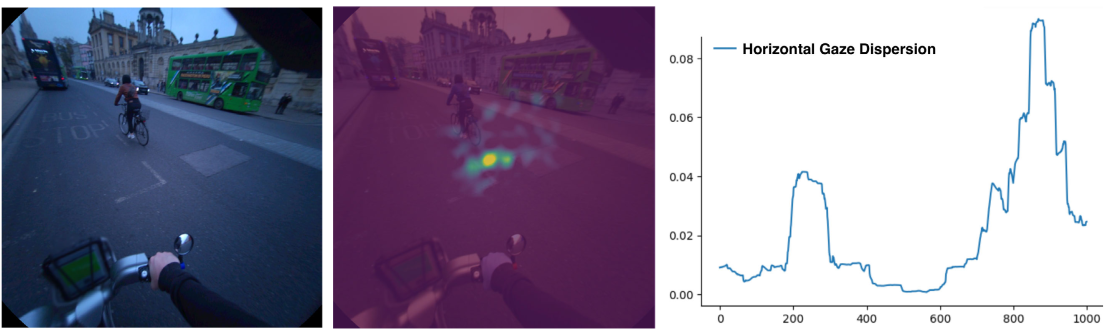
3. Eye Gaze and Attention Mapping
- Generated heatmaps of visual focus using Project Aria gaze tracking.
- Cyclists focus on junctions, approaching vehicles, and pedestrian crossings in high-traffic areas.
- Enables research on human attention, stress, and risk anticipation.
4. Safety Perception Analysis
- Combined self-reported safety ratings with sensor data.
- Found strong correlation with road layout (L1) and other road users’ behavior (L4).
- Supported by incident data from participant surveys and CrashMap.
Potential Applications
The RobotCycle dataset supports a wide range of research applications, including but not limited to:
- Benchmarking SLAM and odometry pipelines under highly dynamic conditions.
- Developing and evaluating multimodal perception, combining LiDAR, vision, IMU, and GPS.
- Studying how cyclists and vehicles interact and share space in real-world traffic environments.
- Quantifying how different types of cycling infrastructure influence safety, comfort, and risk.
- Analysing human attention and situational awareness using gaze, head-motion, and environmental context data.
For more information about the data collection methodology, sensor calibration, open-source toolkit, and analysis results, please refer to our paper:
Efimia Panagiotaki, Divya Thuremella, Jumana Baghabrah, Samuel Sze, Lanke Frank Tarimo Fu, Benjamin Hardin, Tyler Reinmund, Tobit Flatscher, Daniel Marques, Chris Prahacs, Lars Kunze, Daniele De MartiniTransactions on Field Robotics